Инновационные разработки
Сельскохозяйственный робот Garnet


Сельскохозяйственный робот Garnet – это прототип автономного мобильного робота из семейства AgroMultiBot, предназначенный для уборки плодоовощной продукции на открытом грунте.
Робот-комбайн представляет собой самоходный агрегат мостовой схемы на двухколейном двухколёсном шасси с движителями в виде широкопрофильных катков сверхнизкого давления с эластичной беговой дорожкой.
Агрегат оснащен навигационной и позиционирующей системами для автономного перемещения по обрабатываемому участку, компьютерным устройством с сенсорной системой для восстановления виртуального образа структуры посадок и поиска и позиционирования продукции, и высокоадаптивной программой интеллектуального управления режимами работы. Также комбайн оснащен очувствленными рабочими органами в виде многосекционных манипуляторов.
Концепция.Семейство роботов AgroMultiBot реализует концепцию безлюдного сельскохозяйственного производства на основе последовательной разработки и внедрения серии мобильных автономных роботов.
Данная систем пользуется двумя разными алгоритмами:
- Выделяет в видеообразах посадок продукцию по температурно-хроматическим особенностям.
- Восстанавливает с помощью многомодального потока информацию от сенсорной системы (видеокамеры, инфракрасные лучи, ультрафиолетовые, микроволновые, терагерцевые, ультразвуковые, акустические).
Разработчики:
Хамуков Ю.Х. – к.ф.-м.н.; Нагоев З.В. – к.т.н.; Хужоков Р.М.; Заммоев А.У. – к.т.н., Сурхаев А.Б.; Анчеков М. И.; Попов Ю.И.
Сельскохозяйственный робот Hyacinth
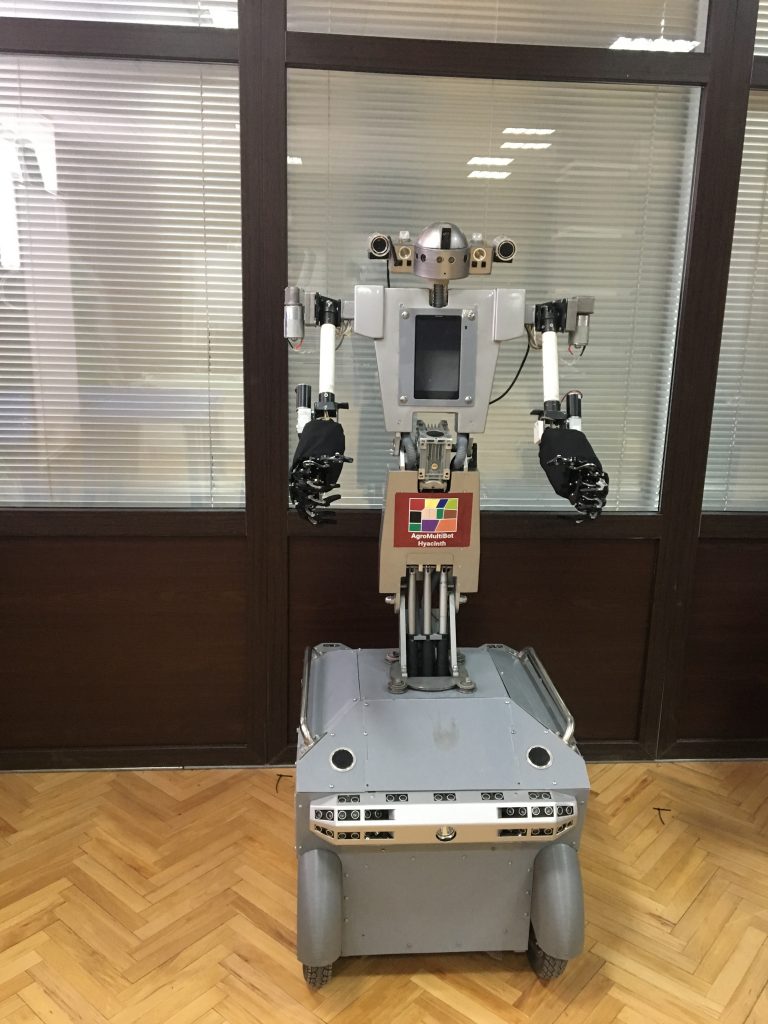
«Hyacinth» – робот-сборщик для уборки плодоовощной продукции на закрытом грунте Данный робот основан на многоцелевой исследовательской робототехнической платформе Муром-ИСП.
Концепция основана на том, что в условиях относительно высокоорганизованной среды, которой являются плодоовощные теплицы, техническая система для замещения человека наиболее эффективна будет, если она выполнена в антропоморфном варианте. Соответственно Hyacinth конструктивно антропоморфен, т.е. он способен выполнить все те кинематические действия, которые выполняет человек при уборке урожая в теплицах.
Данный робот Hyacinthобладает сенсорной системой, которая будет включать в себя:
1. систему видеокамер с цветным изображением, возможно в стерео формате;
2. комплект инфракрасных датчиков, возможно ультрафиолетовых (позволяющих роботу видеть те поды, которые не видны человеку, что позволит собрать 100% урожая) и ультрозвуковых;
3. тактильные датчики на рабочих органах.
Данный поток информации будет поступать в систему распознавания МУРКА, т.е. в мультиагентную рекурсивную когнитивную архитектуру. МУРКА является аппаратно-программной системой для выполнения интеллектуальных операций. Разработана Институтом информатики и проблем регионального управления КБНЦ РАН и является абсолютно оригинальной. Отличается локальным взаимодействием нейронно-подобных элементов организованных на другой принципиальной основе.
Разработчики:
Хамуков Ю.Х. – к.ф.-м.н.; Нагоев З.В. – к.т.н.; Хужоков Р.М.; Заммоев А.У. – к.т.н., Сурхаев А.Б.; Анчеков М. И.; Попов Ю.И.
Мультиагентный робот-разведчик МультиРК


В области робототехники наиболее завершённой разработкой Института информатики и проблем регионального управления Федерального государственного бюджетного научного учреждения “федеральный научный центр “Кабардино-Балкарский научный центр Российской академии наук” является мультиагентный робот-разведчик МультиРК, выполненный по заказу Министерства Российской Федерации по делам гражданской обороны, чрезвычайным ситуациям и ликвидации последствий стихийных бедствий.
В изготовленном в институте информатики и проблем регионального управления опытном образце реализованы все тактико-технические характеристики автономного комплекса, необходимые для осуществления мониторинга территорий, разведки пожароопасных ситуаций, профилактики возгораний и поддержки задач ликвидации последствий аварийных утечек, проливов и возгораний на пожаро- и взрывоопасных объектах и магистралях. Для этого комплекс МультиРК оснащён мощным программно-аппаратным обеспечением экспертного принятия решений на основе данных развитой сенсорной системы, и распределённой системой управления коллективными действиями мобильных и стационарных модулей комплекса. Стоит отметить, что опытный образец комплекса МультиРК удостоен Золотой медали выставки «Интерполитех 2015».
Главной отличительной особенностью комплекса МультиРК является использование транспортной платформы принципиально нового типа – статически уравновешенных одноосных шасси. Транспортные средства с подобными шасси обладают предельной для наземных средств передвижения подвижностью. Они значительно превосходят традиционные многоколёсные и гусеничные средства передвижения по быстроходности, маневренности, проходимости, управляемости и экономичности движения, а также обладают особенно важной для робототехники высокой наблюдаемостью движения. Благодаря этим характеристикам шасси резко возрастают автономность мобильной робототехники и ареал её применимости. Своевременное внедрение одноосных статически уравновешенных шасси в роботостроение способно обеспечить долговременную высокую конкурентоспособность отечественной робототехники.
В частности, шасси для бытовых и специальных роботов, выполненные в виде сегментообразных гусеничных тележек, обеспечивает им практически неограниченнуювездеходность при высокой управляемости. Соответственно, стало возможным создание в короткие сроки семейств бытовых роботов-помощников для ухода за жилыми и производственными помещениями и придомовыми территориями, а также семейств высокоэффективных роботов специального назначения.
Разработчики:
Хамуков Ю.Х. – к.ф.-м.н.; Нагоев З.В. – к.т.н.; Хужоков Р.М.; Заммоев А.У. – к.т.н., Сурхаев А.Б.; Анчеков М. И.; Попов Ю.И.
Робот – автомойщик SWASH

Робот – автомойщик SWASH – мобильный сервисный робот – выполняет мойку автомобиля без участия человека.
SWASH представляет собой робототехническую систему в виде мобильной портальной конструкции из двух агрегатных стоек и шарнирно соединённой с ними П-образной арки с исполнительными органами-манипуляторами и автономным энергетическим модулем.
Робот начинен системами навигации и ориентации, микрофонной системой и спикерами, интеллектуальной экспертной и управляющей системой на базе бортового компьютера, гидравлической и пневматической системой с фильтрами, отстойниками, отделением и упаковщиком загрязнений.
Разработчики:
Хамуков Ю.Х. – к.ф.-м.н.; Нагоев З.В. – к.т.н.; Хужоков Р.М.; Заммоев А.У. – к.т.н., Сурхаев А.Б.; Анчеков М. И.; Попов Ю.И.
Робот- спасатель



Результатом ОКР по проекту “Робот-спасатель” ожидается представление на испытания мультиагентного робототехнического комплекса, способного в безлюдном режиме находить, идентифицировать, подготавливать к эвакуации и эвакуировать раненых из опасной зоны к месту оказания медицинской помощи, или эвакуировать блокированных военнослужащих из занятой противником зоны боевых действий при условии обеспечения безопасной транспортировки без риска причинения дополнительного вреда здоровью раненых и пострадавших.
Принципиальным отличием представленной концепции от известных технических решений в области создания медицинских эвакуационных платформ является, во-первых, использование безлюдного способа отделения раненого/пострадавшего от подложки и погружения его на эвакуационную платформу без изменения позы. Во-вторых – использование для наземного перемещения эвакуационной платформы и вспомогательных автономных модулей на статически уравновешенных одноосных шасси, обеспечивающих мобильным наземным модулям комплекса высокие проходимость, маневренность и управляемость. В-третьих – применение специфического роевого алгоритма локального взаимодействия автономных модулей, обеспечивающего коллективное выполнение задач миссии и альтруистическое индивидуальное поведение вспомогательных модулей, направленное на обеспечение безопасности модуля-эвакуатора при опасных внешних воздействиях различного рода.
Разработчики:
Хамуков Ю.Х. – к.ф.-м.н.; Нагоев З.В. – к.т.н.; Хужоков Р.М.; Заммоев А.У. – к.т.н., Сурхаев А.Б.; Анчеков М. И.; Попов Ю.И.