Сельскохозяйственный робот Hyacinth
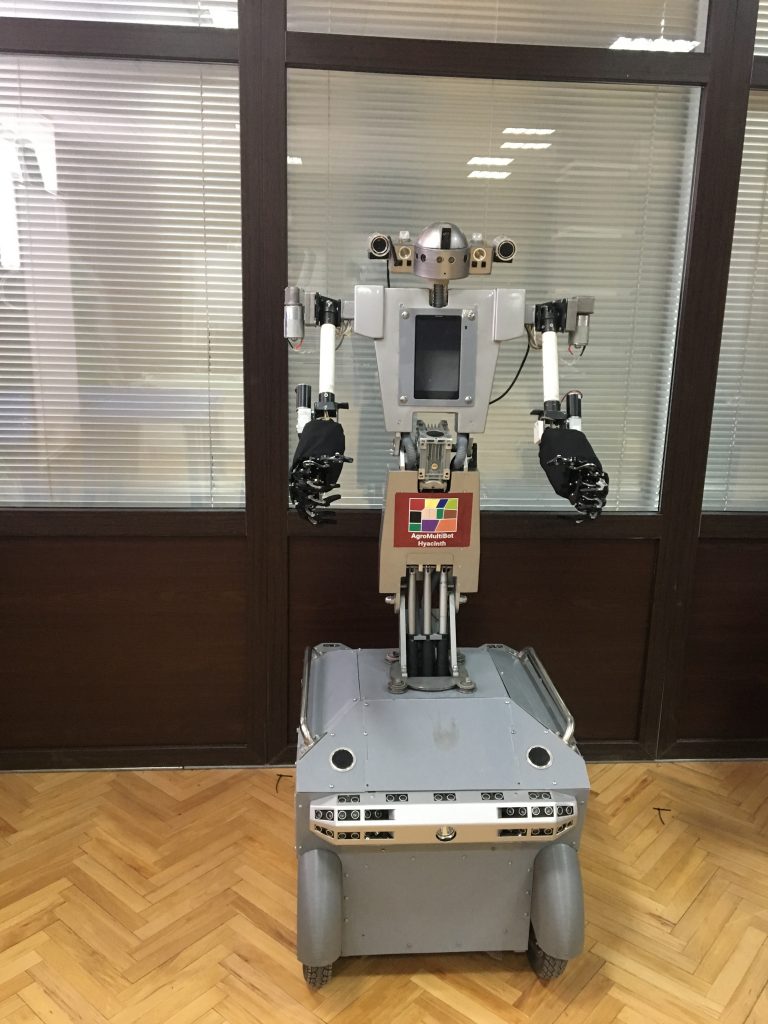
«Hyacinth» – робот-сборщик для уборки плодоовощной продукции на закрытом грунте Данный робот основан на многоцелевой исследовательской робототехнической платформе Муром-ИСП. Концепция основана на том, что в условиях относительно высокоорганизованной среды, которой являются плодоовощные теплицы, техническая система для замещения человека наиболее эффективна будет, если она выполнена в антропоморфном варианте. Соответственно Hyacinth конструктивно антропоморфен, т.е. он способен выполнить все те кинематические действия, которые выполняет человек при уборке урожая в теплицах.
Данный робот Hyacinthобладает сенсорной системой, которая будет включать в себя:
1. Систему видеокамер с цветным изображением, возможно в стерео формате;
2. Комплект инфракрасных датчиков, возможно ультрафиолетовых (позволяющих роботу видеть те поды, которые не видны человеку, что позволит собрать 100% урожая) и ультрозвуковых;
3. Тактильные датчики на рабочих органах.
Данный поток информации будет поступать в систему распознавания МУРКА, т.е. в мультиагентную рекурсивную когнитивную архитектуру. МУРКА является аппаратно-программной системой для выполнения интеллектуальных операций. Разработана Институтом информатики и проблем регионального управления КБНЦ РАН и является абсолютно оригинальной. Отличается локальным взаимодействием нейронно-подобных элементов организованных на другой принципиальной основе.
Разработчики:
Хамуков Ю.Х. – к.ф.-м.н.; Нагоев З.В. – к.т.н.; Хужоков Р.М.; Заммоев А.У. – к.т.н., Сурхаев А.Б.; Анчеков М. И.; Попов Ю.И.